一、 产品特点
l DC7-40V;
l 继电器输出触点隔离;
l 通讯接口支持无线 LORA 方式;
l 通信波特率:2400,4800,9600, 19200,38400(可以通过软件修改,默认9600);
l 通信协议:支持标准modbus RTU 协议;
l 具有闪开、闪断功能,可以在指令里边带参数、操作继电器开一段时间自动关闭;
二、 产品功能
l 四路继电器控制;
l 四路开关量输入;
l 支持电脑软件手动控制;
l 支持本机非锁联动模式;
l 支持本机自锁联动模式;
l 支持互锁模式;
l 双机非锁联动模式;
l 双机自锁联动模式。
三、 产品选型
型号 | modbus | RS232 | RS485 | USB | RJ45 | 继电器 | 输入 |
LORA0404D | ● |
|
|
| ● | 4 | 4 |
四、 主要参数
参数 | 说明 |
触点容量 | 10A/30VDC 10A/250VAC |
耐久性 | 10万次 |
通讯接口 | 无线 LORA |
额定电压 | DC 7-40V |
电源指示 | 1路红色 LED 指示(不通信时常亮,通信时闪烁) |
输出指示 | 4路红色 LED 指示 |
温度范围 | 工业级,-40℃~85℃ |
尺寸 | 115*95*41mm |
重量 | 330g |
默认通讯格式 | 9600,n,8,1 |
波特率 | 2400,4800,9600, 19200,38400 |
软件支持 | 配套配置软件、控制软件; 支持各家组态软件; 支持 Labviewd 等 |
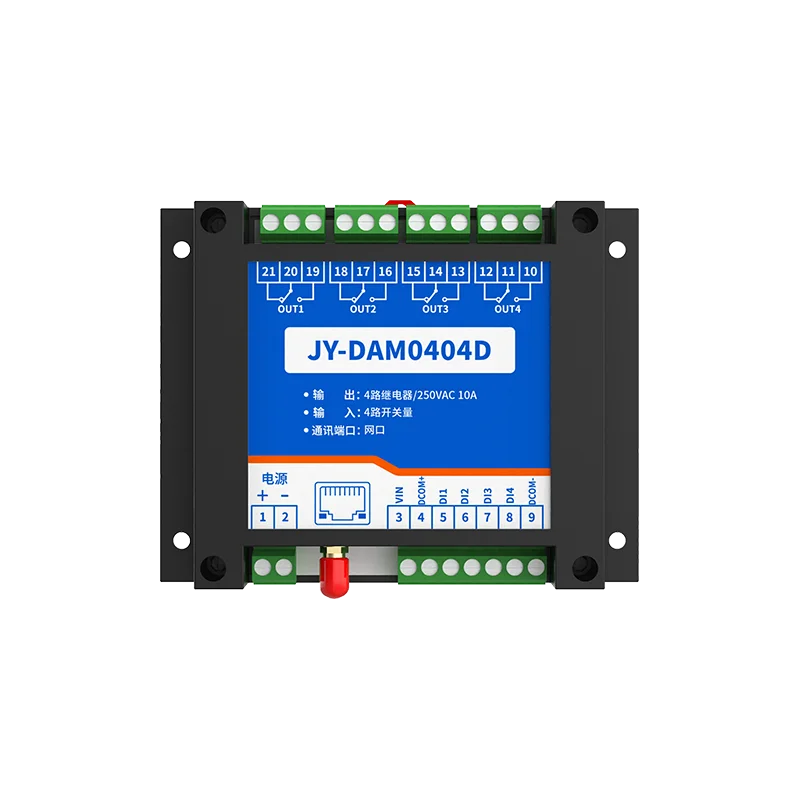
五、 接口说明

六、 引脚说明
序号 | 引脚 | 说明 |
1 | + | 电源正极 |
2 | - | 电源负极 |
3 | VIN | 无源输入时 VIN 和 COM 短接用,具体查看输入接线图 |
4 | COM+ | 无源输入时 VIN 和 COM 短接用,具体查看输入接线图 |
5 | IN1 | 第一路开关量输入 |
6 | IN2 | 第二路开关量输入 |
7 | IN3 | 第三路开关量输入 |
8 | IN4 | 第四路开关量输入 |
9 | COM- | 无源输入时使用,具体查看输入接线图 |
10 | 常开 | 第一路继电器输出常开端 |
11 | 公共端 | 第一路继电器输出公共端 |
12 | 常闭 | 第一路继电器输出常闭端 |
13 | 常开 | 第二路继电器输出常开端 |
14 | 公共端 | 第二路继电器输出公共端 |
15 | 常闭 | 第二路继电器输出常闭端 |
16 | 常开 | 第三路继电器输出常开端 |
17 | 公共端 | 第三路继电器输出公共端 |
18 | 常闭 | 第三路继电器输出常闭端 |
19 | 常开 | 第四路继电器输出常开端 |
20 | 公共端 | 第四路继电器输出公共端 |
21 | 常闭 | 第四路继电器输出常闭端 |
七、 接线方式
1 、 通讯说明

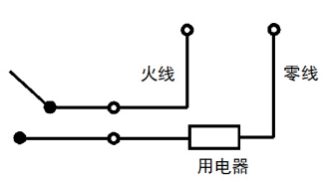
2 、 继电器接线说明
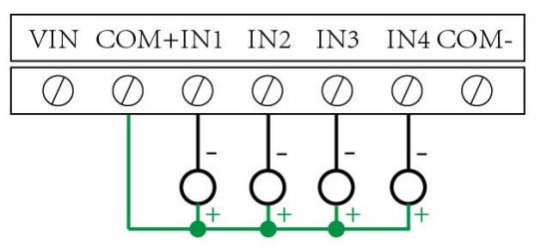
3 、 有源开关量(NPN 型低电平)接线示意图
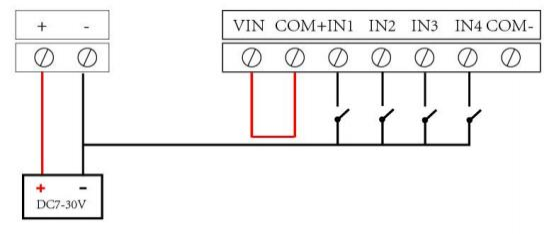
4 、 无源开关量(干接点)接线示意图
八、 配置软件使用说明
使用“LORA 配置软件 ”(相关下载内下载),配置设备的设备地址及设备的无线通信模式。详细配置方法参见“LORA 配置软件使用说明 ”文档。
九、设备工作模式配置
1 、设备地址
1.1 、设备地址的介绍
设备地址默认为 1。
2 、工作模式
2.1 工作模式说明
2.1.1 、本机非锁联动模式
本身带有光耦输入和继电器输出的板卡模块,在该模式下,输入光耦与继电器为直接联动。即:光耦输入信号生效—>对应继电器吸合,光耦输入信号取消—>对应继电器断开。
该模式下因为机械及程序的延迟,光耦输入信号到继电器动作会有一定的延迟,但最大不会超过 0.05 秒。
由于该模式下所有继电器直接受光耦联动,所以会出现串口无法操作继电器
的现象,这并不是异常现象,而是串口操作继电器后,在继电器还为动作之前就被光耦的状态联动了。
2.1.2 、本机自锁联动模式
模块本身带有光耦输入和继电器输出的板卡模块,在该模式下,光耦每输入一次信号,对应的继电器翻转一次。即:
光耦输入信号生效—>继电器翻转(吸合变断开、断开变吸合);
光耦输入信号取消—>继电器不动作;
该模式同样存在非锁模式的延迟问题,但是延迟时间同样不会大于 0.05 秒。
该模式主要可以用于外部信号触发来控制设备启停的场合,例如光耦外接一个按钮,对应的继电器外接用电设备,则每按一次按钮,设备就会切换一次启停状态。
2.1.3 、互锁模式
模块本身带有光耦输入和继电器输出的板卡模块,在该模式下,光耦每输入一次信号,对应的继电器会吸合,其他未输入信号光耦对应继电器会断开。即:
光耦输入信号生效—>对应继电器吸合其它继电器断开;
光耦输入信号取消—>继电器不动作;
该模式同样存在非锁模式的延迟问题,但是延迟时间同样不会大于 0.05 秒。
该模式主要可以用于外部信号触发来控制不同设备启停的场合,例如多路光耦没路外接一个按钮,对应的继电器外接用电设备,则按一路按钮,对应设备就会切换到启动状态,其它设备就会停止运行。
2.1.4 、双机非锁联动模式
该模式需要两个地址相同、模式相同的设备完成,两个设备通过直连 485 或者交叉 232 连接起来之后,模块 1 的光耦状态会直接控制模块 2
的对应继电器的状态,即:
模块 1 的 1 号光耦输入信号生效—>模块 2 的 1 号继电器吸合
模块 1 的 1 号光耦输入信号消失—>模块 2 的 1 号继电器断开
该模式下的继电器相应延迟时间较前几种的模式要长,但不会大于 0.1 秒(9600 波特率)
该模式下如果使用485 总线的话可以并联多个设备,其中设备两两地址匹配,这样可以做到远程的开关量传输。例如:现场有多个低速的开关量需要传输到500
米外的控制机房去控制告警灯或者电铃,则只需在厂房布置几个模块通过两根双绞屏蔽线连接到机房的对应模块,就可以完成该任务。同理也可以把机房操作的按钮信号信号直接传送到位于机房模块的继电器上。
2.1.5 、双机自锁联动模式
该模式需要两个地址相同、模式相同的设备完成,两个设备通过直连 485 或者交叉 232 连接起来之后,模块 1 的光耦状态生效会翻转控制模块 2
的对应继电器的状态,即:
模块 1 的 1 号光耦输入信号生效—>模块 2 的 1 号继电器翻转
模块 1 的 1 号光耦输入信号消失—>模块 2 的 1 号继电器不动作
该模式的应用与“双机非锁联动 ”模式类似,但更适合于远程控制设备的启停,只需在操作端安装一个按钮即可实现按一次启动按一次停止的动作。
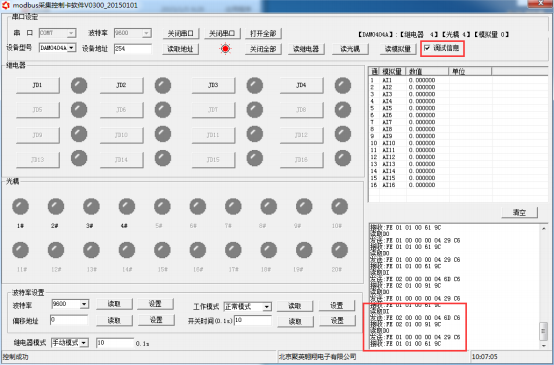
2.2 、工作模式配置
工作模式的设置,同样需要使用DAM 调试软件,同 1.2 中的方法一样,建立虚拟串口,打开 DAM
调试软件,正常通讯后,在软件工作模式部分选择相应工作模式设置即可,如下图所示:
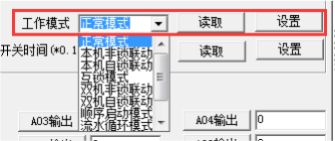
点击设置后,软件下方提示设置成功即可。
3 、闪开闪断功能及设置
3.1 、闪开闪断功能介绍
手动模式:对继电器每操作一次,继电器则翻转一次(闭合时断开,断开时闭合);
闪开模式:对继电器每操作一次,继电器则闭合 1 秒(实际时间【单位秒】 =设置数字*0. 1)后自行断开;
闪断模式:对继电器每操作一次,继电器则断开 1.秒(时间可调)后自行闭合;
3.2 、闪断闪开的设置
闪开闪断模式不能写入设备内部,可以通过发送指令实现,聚英组态软件上即可实现此功能。

注:闪断闪开模式不能写入设备芯片内,软件上选择闪断闪开模式后,所有通道都为闪断闪开模式下,可通过发送单个通道的闪断闪开指令来进行单个通道的控制,不影响其他通道的正常控制。
十、开发资料说明
1 、通讯协议说明
本产品支持标准modbus 指令,有关详细的指令生成与解析方式,可根据本文中的寄存器表结合参考《MODBUS 协议中文版》 即可。
Modbus 协议说明书下载链接地址:https://www.juyingele.com/download/Modbus_poll.zip
2 、Modbus 寄存器说明
线圈寄存器地址表:
寄存器名称 |
| 寄存器地址 | 说明 |
线圈控制 |
|
|
|
线圈 1 | 写线圈 | 00001 | 第一路继电器输出 |
线圈 2 | 1 号指令码 | 00002 | 第二路继电器输出 |
线圈 3 |
| 00003 | 第三路继电器输出 |
线圈 4 |
| 00004 | 第四路继电器输出 |
离散量输入 |
|
|
|
输入 1 | 开关量 |
| 10001 |
| 第一路输入 |
输入 2 | 2 号指令 |
| 10002 |
| 第二路输入 |
输入 3 |
|
| 10003 |
| 第三路输入 |
输入 4 |
|
| 10004 |
| 第四路输入 |
循环控制 |
|
|
|
循环控制【JD1】 | 保持寄存器4 号指令 | 40001-40005 | [0001]:循环操作次数 [0002]:循环操作中闭合时间(ms) |
循环控制【JD2】 | 40006-40010 |
寄存器名称 |
| 寄存器地址 | 说明 |
线圈控制 |
|
|
|
线圈 1 | 写线圈 | 00001 | 第一路继电器输出 |
线圈 2 | 1 号指令码 | 00002 | 第二路继电器输出 |
线圈 3 |
| 00003 | 第三路继电器输出 |
线圈 4 |
| 00004 | 第四路继电器输出 |
离散量输入 |
|
|
|
输入 1 | 开关量 |
| 10001 |
| 第一路输入 |
输入 2 | 2 号指令 |
| 10002 |
| 第二路输入 |
输入 3 |
|
| 10003 |
| 第三路输入 |
输入 4 |
|
| 10004 |
| 第四路输入 |
循环控制 |
|
|
|
循环控制【JD1】 | 保持寄存器4 号指令 | 40001-40005 | [0001]:循环操作次数 [0002]:循环操作中闭合时间(ms) |
循环控制【JD2】 | 40006-40010 |
循环控制【JD3】 |
| 40011-40015 | [0003]:循环操作中断开时间(ms) [0004]:闪断闪闭模式 4: 闪闭操作 2: 闪断操作 其他:无效操作 [0005]:闪开闪闭工作时间(ms) |
循环控制【JD4】 | 40016-40020 |
配置参数 |
通信波特率 | 保持寄存器 | 41001 | 见下表波特率数值对应表,默认为 0,支持 0-5 ,该寄存器同时决定 RS232 和RS485 的通信波特率 |
备用 | 41002 | 备用,用户不可写入任何值。 |
偏移地址 | 41003 | 设备地址=偏移地址+拨码开关地址 |
工作模式 | 41004 | 用户可以使用,存储用户数据 |
延迟时间 | 41005 | 用户可以使用,存储用户数据 |
只读参数 |
|
|
|
设备地址 | 只读寄存器3 号指令 | 30001 | Modbus 访问的地址 |
线圈输出状态 | 30002 | 1-16 |
线圈输出状态 | 30003 | 17-32 |
光耦输入状态 | 30004 | 1-16 |
光耦输入状态 | 30005 | 17-32 |
备注:
① :Modbus 设备指令支持下列Modbus 地址:
00001 至 09999 是离散输出(线圈) 10001 至 19999 是离散输入(触点)
30001 至 39999 是输入寄存器(通常是模拟量输入) 40001 至 49999 是保持寄存器(通常存储设备配置信息)
采用5 位码格式,第一个字符决定寄存器类型,其余 4 个字符代表地址。
地址 1 从 0 开始,如 00001 对应 0000。
波特率数值对应表
数值 | 波特率 |
0 | 9600 |
1 | 2400 |
2 | 4800 |
3 | 9600 |
4 | 19200 |
5 | 38400 |
③ :继电器状态,通过 30002 地址可以查询,也可以通过 00001---00002 地址来查询,但控制只能使用 00001---00002
地址。
30002 地址数据长度为 16bit 。最多可表示 16 个继电器。
对应结果如下:
Bit | 15 | 14 | 13 | 12 | 11 | 10 | 9 | 8 | 7 | 6 | 5 | 4 | 3 | 2 | 1 | 0 |
继 电 器位置 | 8 | 7 | 6 | 5 | 4 | 3 | 2 | 1 | 16 | 15 | 14 | 13 | 12 | 11 | 10 | 9 |
即 寄存器 30009 数据 的 bit8 与寄存器 00001 的数据一样。
同理:光耦输入也是如此。寄存器 30003 的 bit8 、bit9 与寄存器 10001 、10002都对应到指定的硬件上。
寄存器地址按照 PLC 命名规则,真实地址为去掉最高位,然后减一。
3 、指令生成说明
应用举例及其说明:本机地址除了拨码开关地址之外,还有默认的 254 为广播地址。当总线上只有一个设备时,无需关心拨码开关地址,直接使用254 地址即可,当总线上有多个设备时通过拨码开关选择为不同地址,发送控制指令时通过地址区别。
注意:RS485 总线可以挂载多个设备。
指令可通过“聚英翱翔 DAM 调试软件 ”,的调试信息来获取。
指令生成说明:对于下表中没有的指令,用户可以自己根据modbus 协议生成,对于继电器线圈的读写,实际就是对modbus
寄存器中的线圈寄存器的读写,上文中已经说明了继电器寄存器的地址,用户只需生成对寄存器操作的读写指令即可。例如读或者写继电器 1 的状态,实际上是对继电器 1
对应的线圈寄存器0001 的读写操作。
4 、指令列表
情景 | RTU 格式(16 进制发送) |
查询四路状态 | FE 01 00 00 00 04 29 C6 |
查询指令返回信息 | FE 01 01 00 61 9C |
控制第一路开 | FE 05 00 00 FF 00 98 35 |
控制返回信息 | FE 05 00 00 FF 00 98 35 |
控制第一路关 | FE 05 00 00 00 00 D9 C5 |
控制返回信息 | FE 05 00 00 00 00 D9 C5 |
控制第二路开 | FE 05 00 01 FF 00 C9 F5 |
控制第二路关 | FE 05 00 01 00 00 88 05 |
控制第三路开 | FE 05 00 02 FF 00 39 F5 |
控制第三路关 | FE 05 00 02 00 00 78 05 |
控制第四路开 | FE 05 00 03 FF 00 68 35 |
控制第四路关 | FE 05 00 03 00 00 29 C5 |
读第一路光耦 | FE 02 00 00 00 01AD C5 |
返回信息 | FE 02 01 00 91 9C |
读第二路光耦 | FE 02 00 01 00 01 FC 05 |
读第三路光耦 | FE 02 00 02 00 01 0C 05 |
读第四路光耦 | FE 02 00 03 00 01 5D C5 |
5 、指令详解
5.1 、继电器状态
继电器查询(4 路继电器)
发送指令码:FE 01 00 00 00 04 29 C6
字段 | 含义 | 备注 |
FE | 设备地址 | 这里为广播地址 |
01 | 01 指令 | 查询继电器状态指令 |
00 00 | 起始地址 | 要查询的第一个继电器寄存器地址 |
00 04 | 查询数量 | 要查询的继电器数量 |
29 C6 | CRC16 | 前 6 字节数据的CRC16 校验和 |
继电器卡返回信息:
返回码:FE 01 01 00 61 9C
字段 | 含义 | 备注 |
FE | 设备地址 |
|
01 | 01 指令 | 返回指令:如果查询错误,返回 0x81 |
01 | 字节数 | 返回状态信息的所有字节数。1+(n-1)/8 |
00 | 查询的状态 | 返回的继电器状态。 Bit0:第一个继电器状态 Bit1:第二个继电器状态 。。。。。。。 Bit7:第八个继电器状态 |
61 9C | CRC16 | 前 6 字节数据的CRC16 校验和 |
5.2 、光耦输入
查询光耦(4 路光耦)
发送指令码:FE 02 00 00 00 04 6D C6
字段 | 含义 | 备注 |
FE | 设备地址 |
|
02 | 02 指令 | 查询离散量输入(光耦输入)状态指令 |
00 00 | 起始地址 | 要查询的第一个光耦的寄存器地址 |
00 04 | 查询数量 | 要查询的光耦状态数量 |
6D C6 | CRC16 | 前 6 字节数据的CRC16 校验和 |
光耦返回信息:
返回码:FE 02 01 00 91 9C
字段 | 含义 | 备注 |
FE | 设备地址 |
|
02 | 02 指令 | 返回指令:如果查询错误,返回 0x82 |
01 | 字节数 | 返回状态信息的所有字节数。 |
00 | 查询的状态 | 返回的光耦的状态。 Bit0:第一个光耦的状态 Bit1:第二个光耦的状态 。。。。。。。 Bit7:第八个光耦的状态 |
91 9C | CRC16 | 前 6 字节数据的CRC16 校验和 |
5.3 、闪开闪闭指令
闪开闪闭指令解析
闪开发送码:FE 10 00 03 00 02 04 00 04 00 0A 00 D8
闪断发送码:FE 10 00 03 00 02 04 00 02 00 14 21 62
字段 | 含义 | 备注 |
FE | 设备地址 |
|
10 | 10 指令 | 查询输入寄存器指令 |
00 03 | 继电器地址 | 要控制的器地址 |
00 02 | 控制命令数量 | 要对继电的命令个数 |
04 | 字节数 | 控制信息命令的的所有字节数。1+(n-1)/8 |
00 04 或 00 02 | 指令 | 00 04 为闪开指令 00 02 为闪闭命令 |
00 0A | 间断时间 | 00 0A 为十六进制换为十进制则为 10 间隔时间为(0. 1 秒*10) |
00 D8 | CRC16 | 校验方式 |
返回码:FE 10 00 03 00 02 A5 C7
字段 | 含义 | 备注 |
FE | 设备地址 |
|
10 | 10 指令 | 返回指令:如果查询错误,返回 0x82 |
00 03 | 设备地址 | 查询设备的地址 |
00 02 | 接收命令数 | 设备接受的命令个数 |
A5 C7 | CRC16 | 校验位 |
5.4 、全开全关指令
全开全关指令解析
可同时控制指定的多路通道的闭合和断开,将下列指令中的全开全关命令更改即可。
更改方法:将 2 进制转换成 16 进制即可,其中 2 进制中 1 代表闭合,0 代表断开,全开 2 进制为 1111,16 进制为 0F(使用默认的
FF 也可执行),其他多路通道以此类推。
全开发送码:FE 0F 00 00 00 04 01 FF 31 D2
全断发送码:FE 0F 00 00 00 04 01 00 71 92
字段 | 含义 | 备注 |
FE | 设备地址 |
|
0F | 0F 指令 | 返回指令:如果查询错误,返回 0x82 |
00 00 | 起始地址 |
|
00 04 | 控制数量 | 控制的继电器数量 |
01 | 字节数 | 发送命令字节数 |
FF (或 00) | 全开全关命令 | FF 全开命令 00 全关命令 |
31 D2(或 71 92) | CRC16 | 校验位 |
全断全开返回码:FE 0F 00 00 00 04 40 07
字段 | 含义 | 备注 |
FE | 设备地址 |
|
0F | 0F 指令 | 返回指令:如果查询错误,返回 0x82 |
00 00 | 起始地址 |
|
00 04 | 数量 | 返回信息的继电器数量 |
40 07 | CRC16 | 校验位 |
十一、聚英组态软件使用
1 、软件下载
软件名称:聚英组态软件
软件下载链接地址:http://pan.baidu.com/s/1ntPZK4h
2 、软件界面

本软件适用与我公司的 DAM 系列设备连接使用,支持串口、WiFi
等通讯方式。软件更加人性化,能够自主的添加、删除、修改。有清晰的框架结构,便于管理,可实时显示设备状态及采集的数据,可查询历史操作导出历史数据 excel
表格
人员管理结构包含:系统管理员、管理员、操作员、监视员。
设备管理结构包含:区域、设备组、设备。
软件功能:
1. 软件登陆
2. 添加区域
3. 添加设备(设备组命名)
4. 操作设备
5. 定时功能
6. 查看历史数据及数据导出
7. 数据备份及还原
8. 系统设定
3 、软件操作
由于聚英组态软件实现的功能较多,具体操作方法参考阅读:聚英组态软件使用说明.pdf
十二、常见问题与解决方法
1) 搜索不到设备时的解决方法:
1 检查硬件指示灯,
以太网黄色灯常亮:代表链路正常。长灭:网线异常。
以太网绿色灯闪烁:检测到数据传输。
2 操作软件,使能 DHCP 服务
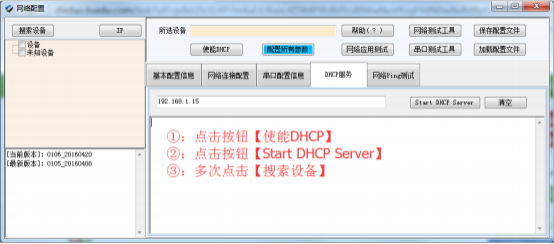
3 如果以上操作仍旧搜索不到,
请确认当前 PC 的网段和设备的网段在一个网段下。
禁用 PC 的其他不用的网卡。
当前 PC 只有一个唯一的局域网 IP。
请用PC 确认网线是好用的。
当前软件仅支持 ipv4。
4 如若仍搜索不到,可对有复位按键的设备进行复位,按住复位键 6S ,无线 LORA 方式灯会灭一下,然后正常显示,第一次复位为设备为动态 IP ,再短接
6S 复位,此时设备为静态 IP;
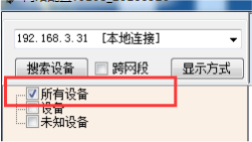
5 勾选所有设备
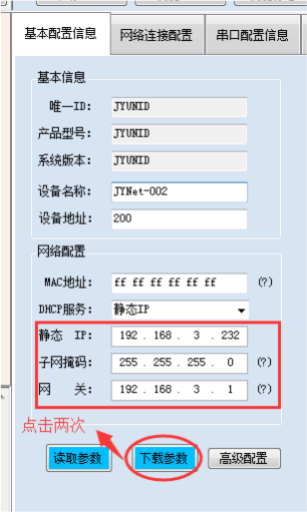
在“基本配置信息 ”栏内,修改设备 IP 为静态 IP ,与电脑所处网段为同一网段,点击“下载参数 ”,2S 后再点击“下载参数
”,提示配置成功。
2)当设备能搜索到,修改设备参数,点击“配置参数 ”无反应时,解决办法:
确认电脑端 IP 与设备要配置的 IP 为同一网段下, 电脑只接入有线或无线网络,当有线和无线网络都接入时,确认两种网络位于同一网段下,当前网络的路由器的
DHCP 处于开启状态。









 官方微信
官方微信
 天猫店铺
天猫店铺
 京东店铺
京东店铺

 销售王经理
销售王经理

